
Back to robots



 Visit website
Visit website
Video
D1 Edu
Company: AGIBOT Innovation Technology
Robot details
Manufacturing country
🇨🇳 China
Autonomy level
Assisted
Status
In production
Release date
18 Aug 2024
Height (cm)
40
Weight (kg)
15
Flagship robot
D1 Edu
Robot types
Mobile
Primary use cases
Inspection
Education
Research
About
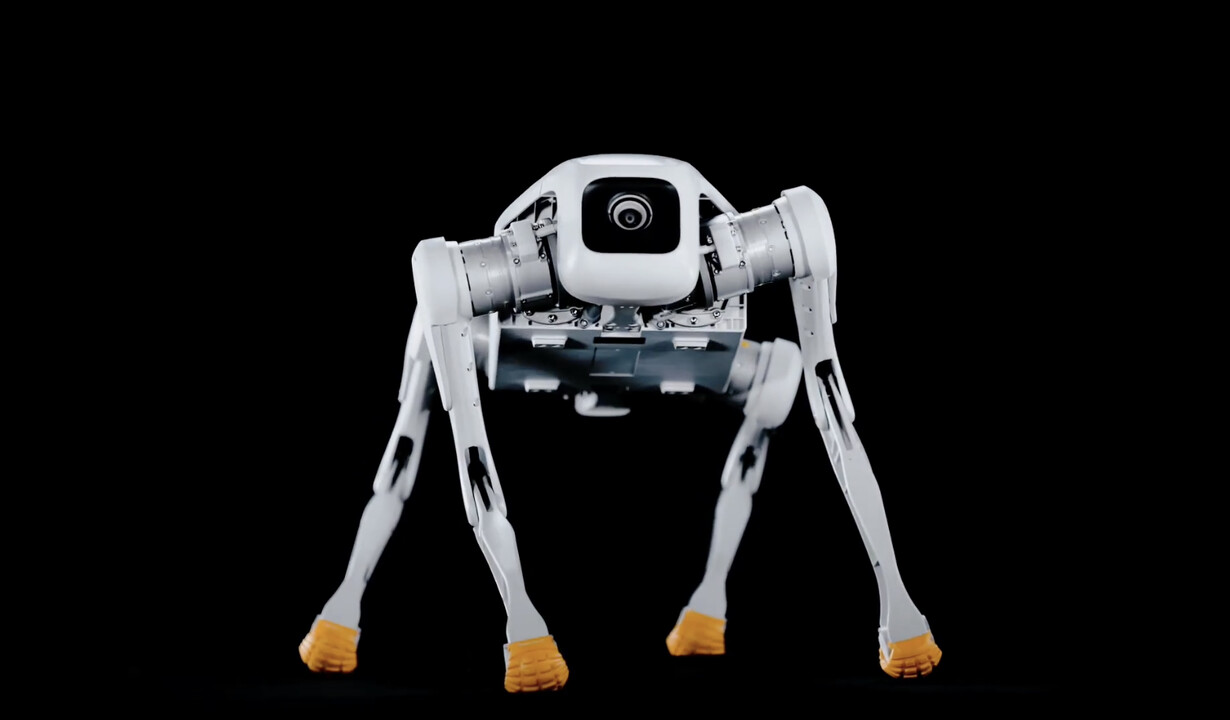
AGIBOT D1 Edu is an education- and research-oriented quadruped robot platform offering the same robust mobility as D1 Pro, enhanced with SDK support, secondary development capabilities, and rich hardware expansion interfaces for academic and R&D use.
Specs
AGIBOT D1 Edu shares the same mechanical platform as D1 Pro, with a maximum speed of 3.7 m/s, payload of approximately 8 kg, 48 N·m peak joint torque, and 12 precision motors. It adds support for secondary development, SDK access, Ethernet and USB interfaces, SBUS and UART ports, and compatibility with LiDAR, depth cameras, RTK, 4G/5G, and image transmission modules. It supports URDF modeling and simulation in Isaac Sim and Mujoco environments.
Similar robots
-
 In production$12,700.00A high-integration dexterous robotic hand with enhanced perception and human-like design, built for advanced manipulation tasks using mul...
In production$12,700.00A high-integration dexterous robotic hand with enhanced perception and human-like design, built for advanced manipulation tasks using mul... -
 In production$20,000.00A compact, high-degree-of-freedom dexterous robotic hand designed for human-like manipulation, enabling robots to grasp, interact, and pe...
In production$20,000.00A compact, high-degree-of-freedom dexterous robotic hand designed for human-like manipulation, enabling robots to grasp, interact, and pe... -
 In production$20,000.00AGIBOT G1 is a general-purpose embodied robot designed for large-scale data collection and model inference, supporting multi-scenario ope...
In production$20,000.00AGIBOT G1 is a general-purpose embodied robot designed for large-scale data collection and model inference, supporting multi-scenario ope... -
 In production$160,000.00AGIBOT G2 is an industrial-grade interactive embodied operation robot designed for high-precision force-controlled tasks, human-like moti...
In production$160,000.00AGIBOT G2 is an industrial-grade interactive embodied operation robot designed for high-precision force-controlled tasks, human-like moti...





