
Back to robots

 Visit website
Visit website
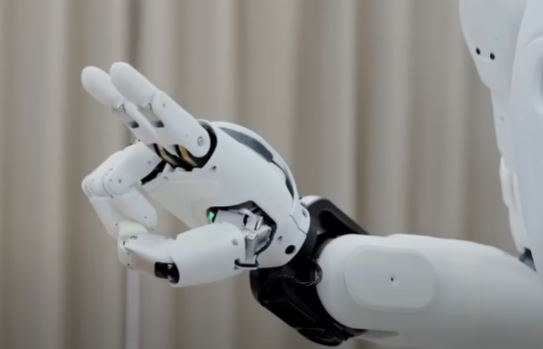
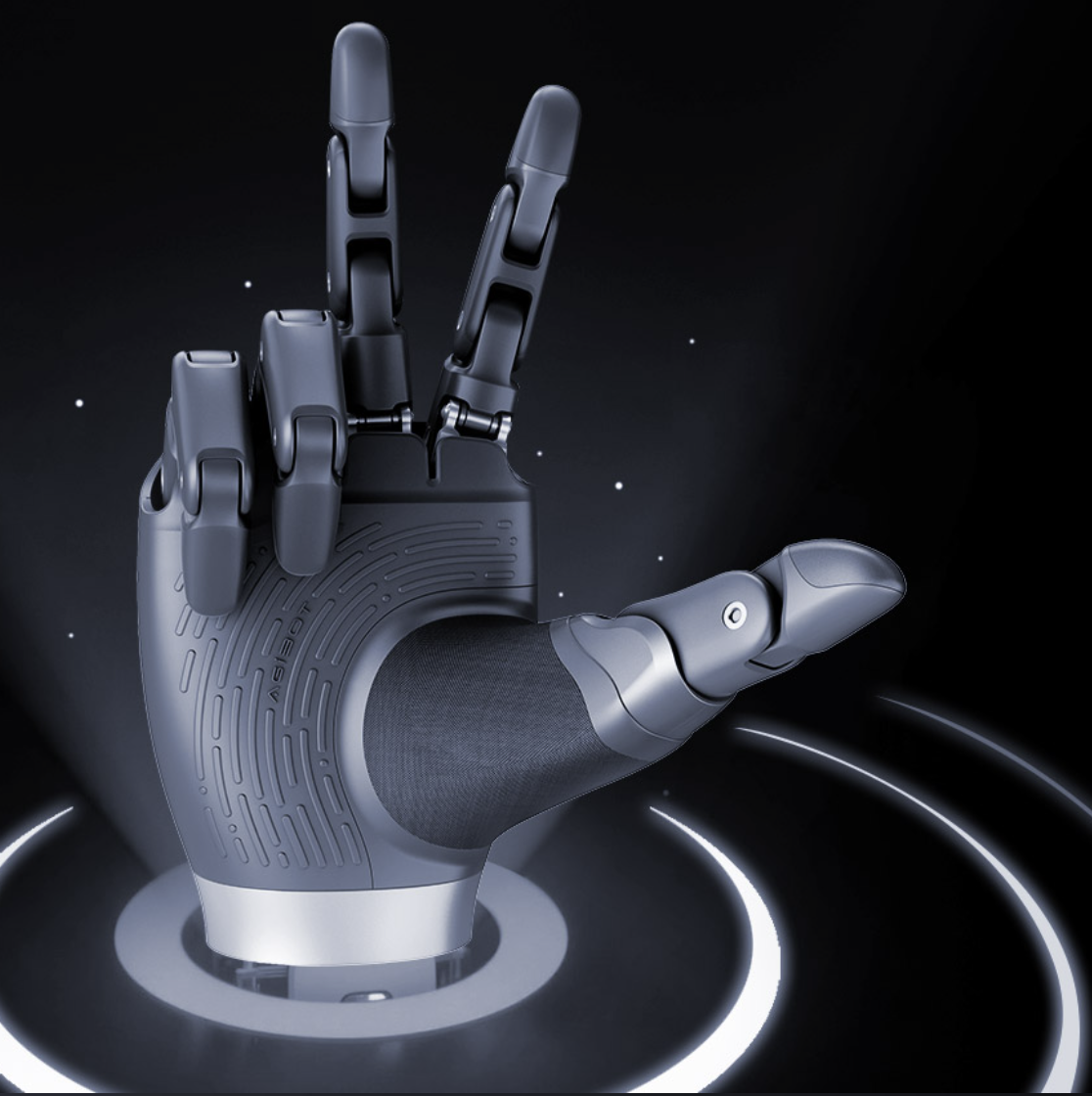
OmniHand O10
Company: AGIBOT Innovation Technology
$20,000.00
Robot details
Manufacturing country
🇨🇳 China
Autonomy level
Teleoperated
Status
In production
Release date
16 Dec 2025
Height (cm)
18
Robot types
Manipulator
Service
Primary use cases
Home Assistance
Education
Research
Other
About
A compact, high-degree-of-freedom dexterous robotic hand designed for human-like manipulation, enabling robots to grasp, interact, and perform fine motor tasks with tactile sensing and adaptive control.
Specs
The OmniHand O10 features 10 active and 16 total degrees of freedom with a five-finger anthropomorphic design, enabling human-like grasping and gestures. It includes over 400 tactile sensing points with ~0.1N resolution, supports hybrid force control with ≥5 kg grip force, and achieves ~0.3 mm positioning accuracy. The hand operates via CAN-FD/RS485 interfaces, supports multiple control modes (including teleoperation and AI-based control), and is optimized for lightweight integration with humanoid robots and robotic arms.
Similar robots
-
 In production$12,700.00A high-integration dexterous robotic hand with enhanced perception and human-like design, built for advanced manipulation tasks using mul...
In production$12,700.00A high-integration dexterous robotic hand with enhanced perception and human-like design, built for advanced manipulation tasks using mul... -
 In production$20,000.00AGIBOT G1 is a general-purpose embodied robot designed for large-scale data collection and model inference, supporting multi-scenario ope...
In production$20,000.00AGIBOT G1 is a general-purpose embodied robot designed for large-scale data collection and model inference, supporting multi-scenario ope... -
 In production$160,000.00AGIBOT G2 is an industrial-grade interactive embodied operation robot designed for high-precision force-controlled tasks, human-like moti...
In production$160,000.00AGIBOT G2 is an industrial-grade interactive embodied operation robot designed for high-precision force-controlled tasks, human-like moti... -
 In productionAGIBOT D1 Edu is an education- and research-oriented quadruped robot platform offering the same robust mobility as D1 Pro, enhanced with ...
In productionAGIBOT D1 Edu is an education- and research-oriented quadruped robot platform offering the same robust mobility as D1 Pro, enhanced with ...





