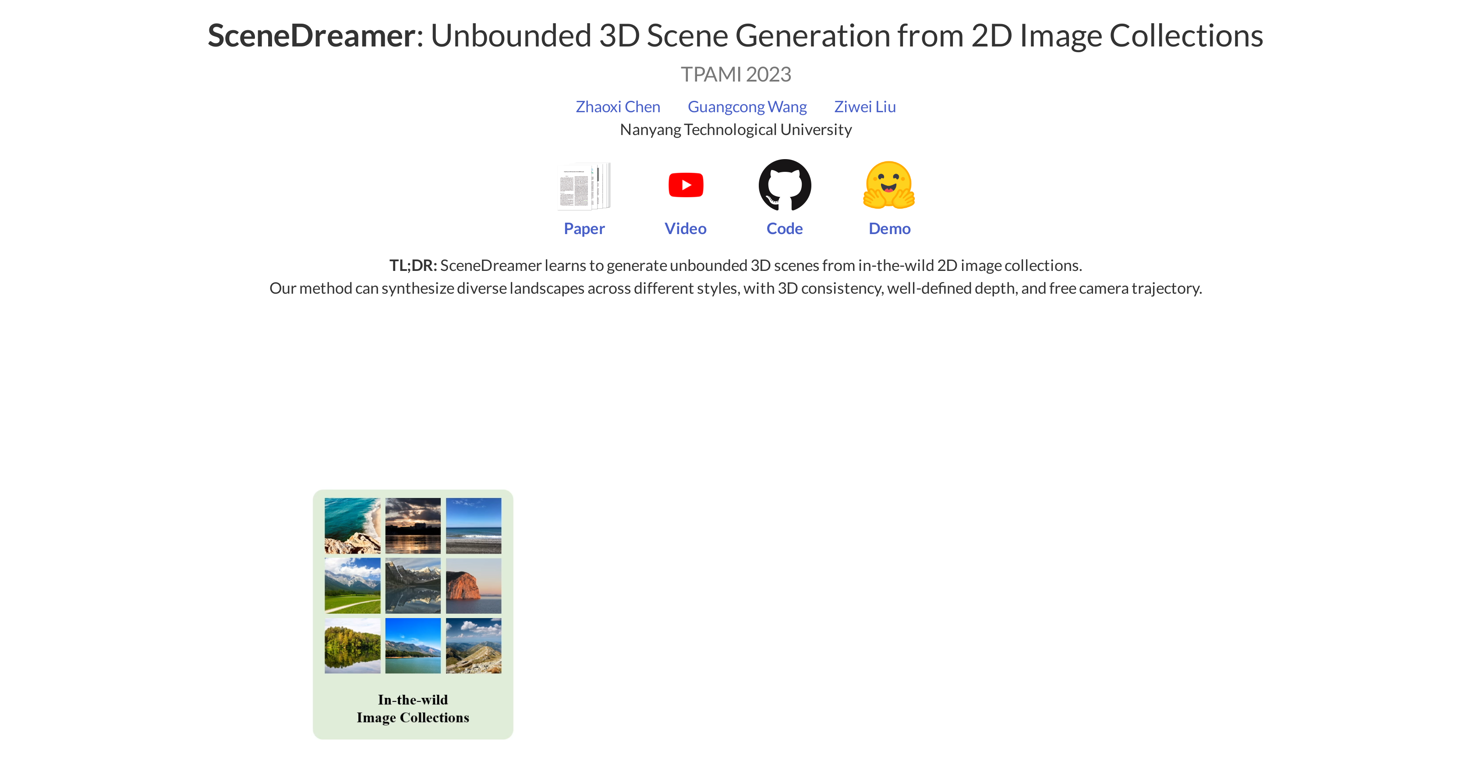
What is SceneDreamer?
SceneDreamer is a cutting-edge AI tool that specializes in the conversion of 2D images into unbounded 3D scenes. It's an unconditional generative model that uses information from random noises to create large-scale 3D landscapes. SceneDreamer is trained entirely from in-the-wild 2D image collections, without relying on 3D annotations. The system's learning paradigm ensures an efficient and expressive 3D scene representation, a generative scene parameterization, and a functional renderer that takes advantage of data from 2D images.
How does SceneDreamer work?
SceneDreamer works by applying a unique learning paradigm that includes an efficient 3D scene representation, a generative scene parameterization, and a functional renderer. The 3D scene representation begins with an effective bird's-eye-view derived from simplex noise, consisting of a height field and a semantic field. SceneDreamer then uses a generative neural hash grid to parameterize the latent space based on the 3D positions and the scene's semantics. Finally, a neural volumetric renderer, taught using adversarial training from 2D image collections, is used to deliver photorealistic images.
What is the bird's-eye-view (BEV) representation in SceneDreamer?
The bird's-eye-view (BEV) representation in SceneDreamer is a simplified yet comprehensive 3D scene representation generated from simplex noise. It consists of a height field that stands for the surface elevation of the 3D scene, and a semantic field which provides in-depth scene semantics. The BEV representation allows SceneDreamer to express 3D scenes with quadratic complexity, disentangle geometry and semantics, and ensure effective training.
What is simplex noise used for in SceneDreamer?
In SceneDreamer, simplex noise is employed to generate the initial bird's-eye-view (BEV) representation. The BEV representation is instrumental in creating the height and semantic fields that represent surface elevation and in-depth semantics of the 3D scene respectively. In essence, simplex noise provides the raw elemental data required to create the 3D scenes.
What is the generative neural hash grid in SceneDreamer?
The generative neural hash grid in SceneDreamer operates as a unique parameterizer for the latent space in 3D modeling. It considers 3D positions and scene semantics to encode generalizable features across different scenes and ensure content alignment. The grid is a cornerstone in SceneDreamer's system for determining the specifics of the 3D scene to be generated.
What is the semantic field and height field in the BEV representation used for in SceneDreamer?
The semantic field and height field in SceneDreamer's BEV representation play critical roles in 3D scene development. The height field stands for the surface elevation nuances of the 3D scene - the various ups and downs that define its shape. The semantic field, on the other hand, provides detailed scene semantics. It delivers underlying meanings or interpretations pertaining to the elements of the scene. Together, these fields allow SceneDreamer to create a complete 3D depiction with both geometric and semantic detail.
How does SceneDreamer generate large-scale 3D scenes?
SceneDreamer utilizes a unique combination of a bird's eye view representation, a generative neural hash grid, and a neural volumetric renderer to generate large-scale 3D scenes. It begins with a bird's-eye-view (BEV) representation that is created from simplex noise and is made up of a height field and a semantic field. The BEV representation allows for representing a 3D scene with quadratic complexity. Then SceneDreamer uses a generative neural hash grid to parameterize the latent space based on 3D positions and scene semantics. Finally, a neural volumetric renderer, trained through adversarial training from 2D image collections, is employed to produce photorealistic images.
How does SceneDreamer convert 2D images into 3D scenes?
SceneDreamer uses a bird's eye view representation derived from simplex noise to convert 2D images into 3D scenes. This representation is composed of a height field (representing surface elevation) and a semantic field providing detailed scene semantics. After the scene representation is created, a generative neural hash grid is employed to parameterize the hyperspace of space-varied and scene-varied latent features. Lastly, a style-modulated renderer is used to blend these latent features and render the 3D scene into 2D images via a process called volume rendering.
What is the purpose of the efficient and expressive 3D scene representation in SceneDreamer?
The purpose of the efficient and expressive 3D scene representation in SceneDreamer is twofold. Firstly, it provides a comprehensive framework to capture the surface elevation and detailed semantics of a scene in the form of a height field and a semantic field. This representation is efficient, capturing 3D scenes with quadratic complexity. Secondly, it aids in the disentanglement of scene geometry and semantics, which is critical for the authenticity and realism of the generated 3D scenes.
How does the tool handle camera mobility?
SceneDreamer handles camera mobility by allowing the camera to move freely and get realistic renderings within the synthesized large-scale 3D scenes. This is possible due to the unbounded or limitless nature of the 3D scenes that SceneDreamer is capable of generating, offering dynamic scene visualization.
How does SceneDreamer perform efficient training?
SceneDreamer achieves efficient training through its bird's-eye-view (BEV) representation. The BEV representation is generated from simplex noise and includes a height field and a semantic field. As the BEV allows for the representation of a 3D scene with quadratic complexity, it facilitates disentangling of geometry and semantics of the scene, ultimately leading to more efficient training of the AI model.
What is 'disentangled geometry' in SceneDreamer?
'Disentangled geometry' in SceneDreamer refers to the separation or distinction of the geometric structure of the scene from its semantics or meaning. This separation is facilitated by the BEV scene representation and allows SceneDreamer to process the scene's geometric details and semantic context independently, leading to richer and more refined 3D scene generation.
What is the role of the neural volumetric renderer in SceneDreamer?
The role of the neural volumetric renderers in SceneDreamer is to transform the parameterized latent space into photorealistic images. Trained through adversarial training from 2D image collections, these renderers are key to creating high-quality renderings that closely mimic the detail and visual complexity of real-world scenes.
How does SceneDreamer leverage knowledge from 2D images?
SceneDreamer leverages knowledge from 2D images by using them as the foundational training material for the neural volumetric renderer. Through adversarial training techniques, the renderer learns how to convert the detailed parameterization of the latent space into 2D images that are highly realistic and visually complex.
How does SceneDreamer encode generalizable features across scenes?
SceneDreamer encodes generalizable features across scenes through its generative neural hash grid. The grid parameterizes the latent space based on 3D positions and scene semantics, creating a unique set of encoded features for each scene. These encoded features can then be used to generate diverse yet consistent scenes in 3D space.
What does 'unbounded 3D scene generation' mean in the context of SceneDreamer?
'Unbounded 3D scene generation' in the context of SceneDreamer means creating large-scale 3D scenes that have no limits in terms of size or complexity. It's the synthesis of expansive 3D landscapes from random noises, all the while maintaining 3D consistency and enabling free camera movement within these landscapes.
What makes SceneDreamer superior to other state-of-the-art methods?
SceneDreamer's superiority over other state-of-the-art methods can be attributed to several factors including its ability to synthesize unbounded 3D scenes from random noises, its effective learning method, and its use of a generative neural hash grid for latent space parameterization. The method provides disentangled geometry and semantics, and uses a neural volumetric renderer that leverages knowledge from 2D images, producing more realistic and photorealistic scenes. It also enables dynamic scene visualization with seamless camera mobility.
Can SceneDreamer generate diverse landscapes across different styles?
Yes, SceneDreamer is capable of generating diverse landscapes across different styles. Through its generative model and extensive training from in-the-wild 2D image collections, SceneDreamer can synthesize diverse landscapes that retain 3D consistency, feature well-defined depth, and allow for free camera trajectory.
What is the principle of SceneDreamer's learning paradigm?
The principle of SceneDreamer's learning paradigm hinges on three core components. First, it utilizes an efficient yet expressive 3D scene representation, which comprises a bird's-eye-view (BEV) representation generated from simplex noise. Second, it employs a generative scene parameterization, pivotal for capturing the semantics and generating features of the 3D scene. The last component is an effective renderer that can leverage knowledge from 2D images, allowing SceneDreamer to render high-quality, photorealistic 3D scenes from 2D image collections.
What elements are part of SceneDreamer's Scene Parameterization?
SceneDreamer's Scene Parameterization consists of two core elements, a height field and a semantic field. The height field provides the surface elevation of the scenes, while the semantic field delivers the in-depth scene semantics, both key in generating varied and detailed 3D scenery. Furthermore, a generative neural hash grid is used to parameterize the hyperspace of space-varied and scene-varied latent features given scene semantics and 3D position.